实验相关信息
1.实验原理
人工林抚育采伐作业及造材控制虚拟仿真实验项目以虚拟的方式展现现代林业抚育采伐工程全机械化过程,包括利用林木联合抚育采伐机实现“采伐—造材”一体化的新模式。涉及实验基本原理内容主要包含林区作业基本知识、抚育采伐工艺、采伐机定长造材、PID参数整定四部分内容。
1. 林区作业基本知识
首先,通过理论学习,结合实际林区情况,了解林区环境及采伐作业时可能出现的安全问题,如伐木作业顺序、树倒方向、集运材方向、设备操作方法等,初步学会解决问题的方法。其次,了解作业林区的环境及作业树种的情况,学习初步判断作业林区的采伐方法(间伐、择伐、皆伐等)。最后,采伐作业设备功能、结构认知:逐一认识抚育采伐作业的主要设备,深入了解其整体和局部功能、结构特点(尤其是末端执行机构的工作原理)、整机参数等信息,为学习采伐机的基本操作奠定理论基础。
2. 抚育采伐工艺
林木抚育采伐工艺的确定:根据目标林区树木的特点,选择割灌作业区域、抚育间伐区域、皆伐区域。
制定具体的采伐工艺流程如下:
抚育间伐工艺:一般为小径木,其工艺流程为:采伐——打枝——造材——归堆——运输
皆伐工艺:一般为成熟的林木,根据造材地点不同,其工艺流程主要可分为:①林区造材:采伐——打枝——造材——归堆——集材;②山下楞场造材:采伐——归堆——集材——打枝——造材等两类
林下疏伐工艺:一般为灌木类,其工艺流程为:采伐——收集——打捆/削片(也可在楞场再削片粉碎)——归堆——运输
确定采伐工艺后,学习抚育采伐设备的基本操作规程以及进行操作实践,现代化抚育采伐工艺流程图如图2-1所示。
.jpg)
图2-1 基于现代化林业机械装备下抚育采伐工艺示意图
3. 林木联合采伐机造材
林木联合采伐机末端执行装置(一般称为采伐头)是采伐机的核心工作装置,林木伐倒、打枝和定长造材等功能都由它来完成。作业工序是:采伐头须抱紧树干、伐倒树木、打枝、造材。造材是把伐倒的树木(原条)按照一定长度规格截断,要求造材长度误差在-2cm至+6cm之间,因此,采伐机定长造材过程中,通过传感器测量材长并控制测量精度是非常关键的功能,而采伐头控制器的PID参数整定是其关键技术。

图2-2 林木联合采伐机作业过程
4. 工程PID参数整定
首先,理解PID控制算法。按偏差的比例、积分和微分进行控制(简称PID控制)是连续系统控制理论中技术最成熟、应用最广泛的一种控制技术。它结构简单,参数调整方便,是在长期的工程实践中总结出来的一套控制方法。
PID控制规律:  (1-1)
(1-1)
其中,Kp是比例系数;Ti为积分时间常数;Td为微分时间常数。
其次,了解PID算法精准控制造材过程。在实际造材过程中,要求控制参数必须准确可靠,避免造成不必要的材料浪费,保证准确的成材尺寸。林木联合采伐机造材控制系统是一个典型的工程PID控制问题。在这个环节,可训练学生深入理解控制理论和计算机控制系统,进一步掌握工程中PID调节规律的程序实现和参数整定,以及抚育采伐机采伐头电液比例控制的驱动方法。通过控制系统参数调节后的进料造材数据,和直观的视景仿真进料过程,可以充分让学生体验到利用PID调节对于造材过程的控制,同时对林业作业对象也有更为直观的了解。
最后,掌握PID参数整定方法。本实验项目使用的整定方法为临界比例度法和反应曲线法,两种都属于Ziegler-Nichols工程整定法。
临界比例度法适用于未知对象传递函数的场合,在闭合的控制系统里,将调节器置于纯比例作用下,从大到小逐渐改变调节器的比例度,得到等幅振荡的过度过程。此时的比例度称为临界比例度δK,相邻两个波峰间的时间间隔称为临界振荡周期TK。用临界比例度法整定PID参数的步骤如下:
①把调节器的积分环节和微分环节断开,比例度置较大数值,把系统投入闭环运行,然后将调节器比例度Kp由大逐渐减小,得到临界振荡过程。这时候的比例度叫做临界比例度Kpcnt,振荡的两个波峰之间的时间即为临界振荡周期Tn。
②根据Kpcnt和Tn的值,运用表2-1中的经验公式,计算出调节器各个参数Kp、Ti和Td的值。
③根据计算结果设置调节器的参数值。运行之后,即可得到响应曲线。
④按“先P后I最后D的操作程序将调节器的整个参数调到计算值上,若还不够满意可再进一步调整。
表2-1 临界比例度法整定控制器参数
|
控制器 |
Kp |
Ti |
Td |
|
P |
0.5 Kpcnt |
---- |
---- |
|
PI |
0.45 Kpcnt |
0.85 Tn |
---- |
|
PID |
0.6 Kpcnt |
0.5 Tn |
0.12 Tn |
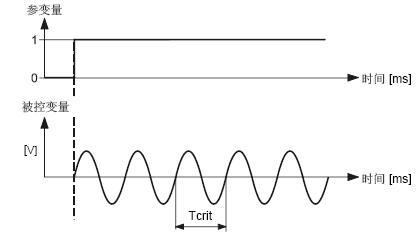
图2-3 稳态振荡
反应曲线法是工程上最常用的快速整定PID参数的方法。Ziegler-Nichols法根据给定对象的瞬态响应来确定PID控制器的参数,它首先通过实验,获取控制对象的阶跃响应,即在系统开环、带负载并处于稳定的状态下,给系统输入一个阶跃信号,测量系统的输出响应曲线,如下图2-4所示:
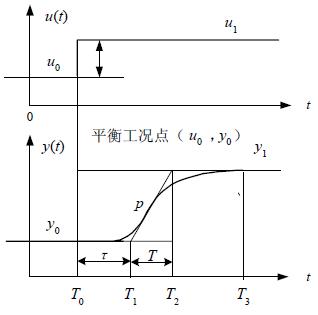
图2-4 阶跃激励信号与被控对象的阶跃响应曲线
如果阶跃响应曲线y(t)看起来是一条S形的曲线,则可用此法,否则不能用。
S形曲线用滞后时间τ和时间常数T来描述,对象传递函数可近似为:
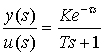 (2-2)
(2-2)
其中K是放大系数:
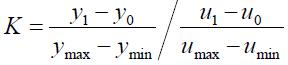 (2-3)
(2-3)
可根据表2-2计算出KP、Ti、Td的值。
表2-2 反应曲线法整定控制器参数
|
调节规律 |
KP |
Ti |
Td |
|
P |
T/Kτ |
∞ |
0 |
|
PI |
0.9 T/Kτ |
3.3τ |
0 |
|
PID |
1.2 T/Kτ |
2τ-2.2τ |
0.5τ |
5. 对应的知识点:共 15 个
1) 抚育采伐装备的结构与功能
2) 抚育采伐装备操作规程
3) 间伐、皆伐、渐伐等采伐概念
4) 林内割灌的目的与意义及割灌机操作和运动原理
5) 生物质收集的目的与意义
6) 油锯的操作安全规程
7)作业安全的影响因素与防范知识
8)装备底盘的通过性能(越障、爬坡、动力)
9) 机械作业对环境的影响机理
10)造材的目的与意义
11) 采伐头的结构与定长造材工艺
12) 造材的控制方法
13) 木材检尺标准及计算方法
14) PID临界比例度法参数整定方法
15)PID反应曲线法参数整定方法